 LiU Homepage
LiU Homepage
Robotics and Autonomous Systems
This research area encompasses a wide range of applications from industrial robots and automobiles to trucks and airborne vehicles. One common feature for all applications is that knowledge and methods from the other research areas of the division, i.e. system identification, sensor fusion, and optimization, are crucial for success when dealing with such applications. Another property is that the research to a large extent is carried out on in collaboration with industry via various research platforms, such as LINK-SIC.
Industrial robots
The research is motivated by the challenge to keep or improve the robot performance while there is a continuously ongoing product cost reduction. The cost reduction results in more compliant robot structures with lower eigenfrequencies, higher friction, more nonlinear behavior, larger backlash, more complex vibration modes, and larger dynamic parameter variations between otherwise identical robots. The model-based control used today must therefore be further refined, for example to make it possible to adapt model parameters to the robot individuals and to take care of more complex robot dynamics. Improved diagnosis is also very important in order to be able to plan maintenance without disturbing the production. Accurate robot models are also needed for reliable diagnosis and the problems with increasing model complexity and larger model variations must be handled in the diagnosis case as well. Additional sensors will open up for improved tracking accuracy but also for more precise diagnosis functions.
Autonomous systems
An autonomous system is a system that can perform some desired task within an unstructured environment without human intervention. Our research on autonomous systems is focused on making use of measurements from various sensors in order to understand what happens and gain situational awareness. This information is necessary input to for example motion planners and control systems, which can then provide the functionality that is needed. The activities involve both basic research and more applied research, where the latter is typically carried out in close collaboration with industry. The applied research is very important when it comes to autonomous systems and to mention a few examples that we have been working on, we have unmanned areal vehicles, active safety systems within the automotive industry and fighter aircraft navigation.
Examples
The diagram illustrates the errors in three different configurations for a calibrated triaxial accelerometer mounted with an unknown position and orientation on the end effector of a 6 degrees-of-freedom manipulator arm.
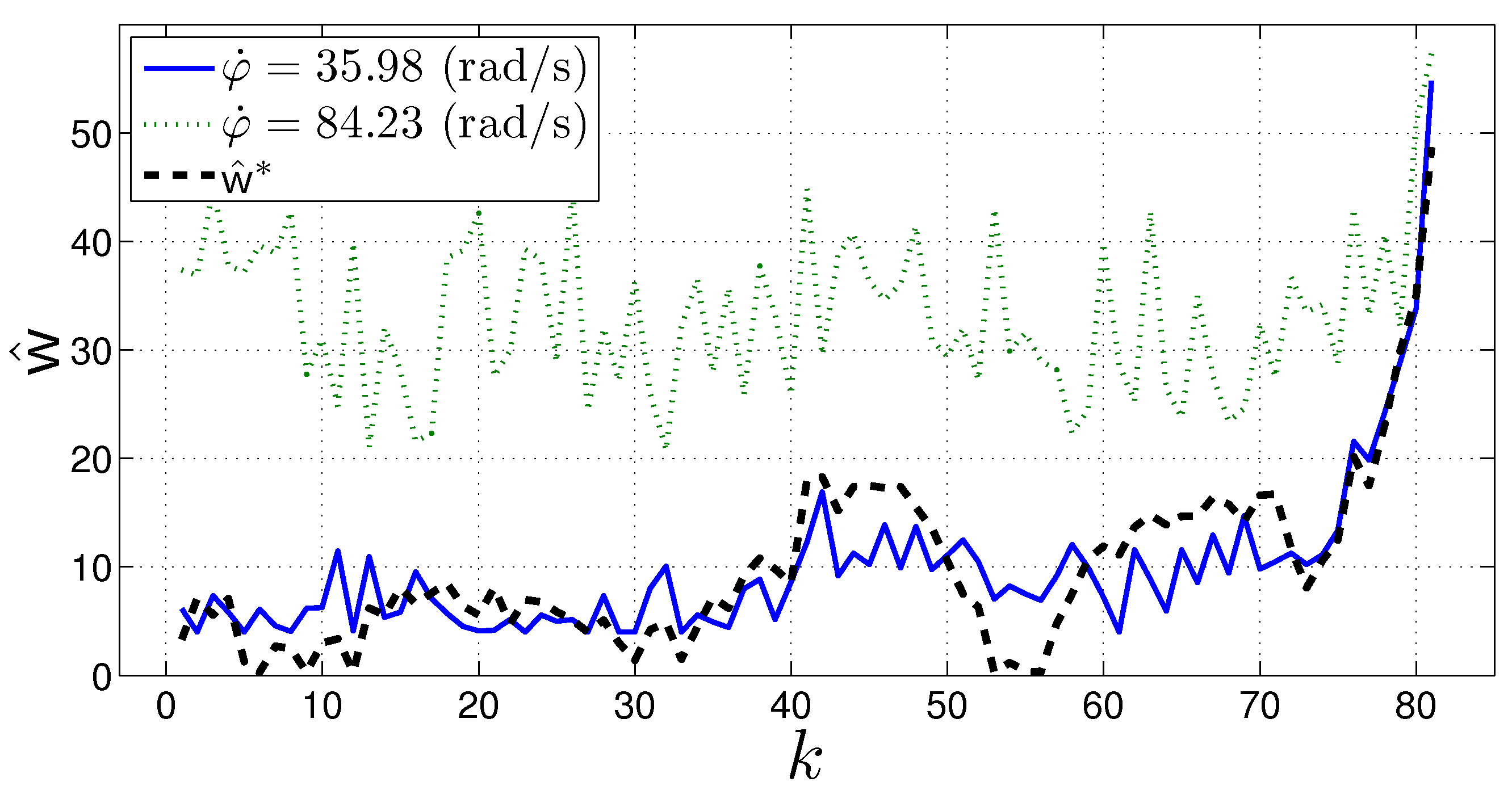
Model-based wear estimation from friction data collected under different speeds. The dashed line relates to a best possible estimate.
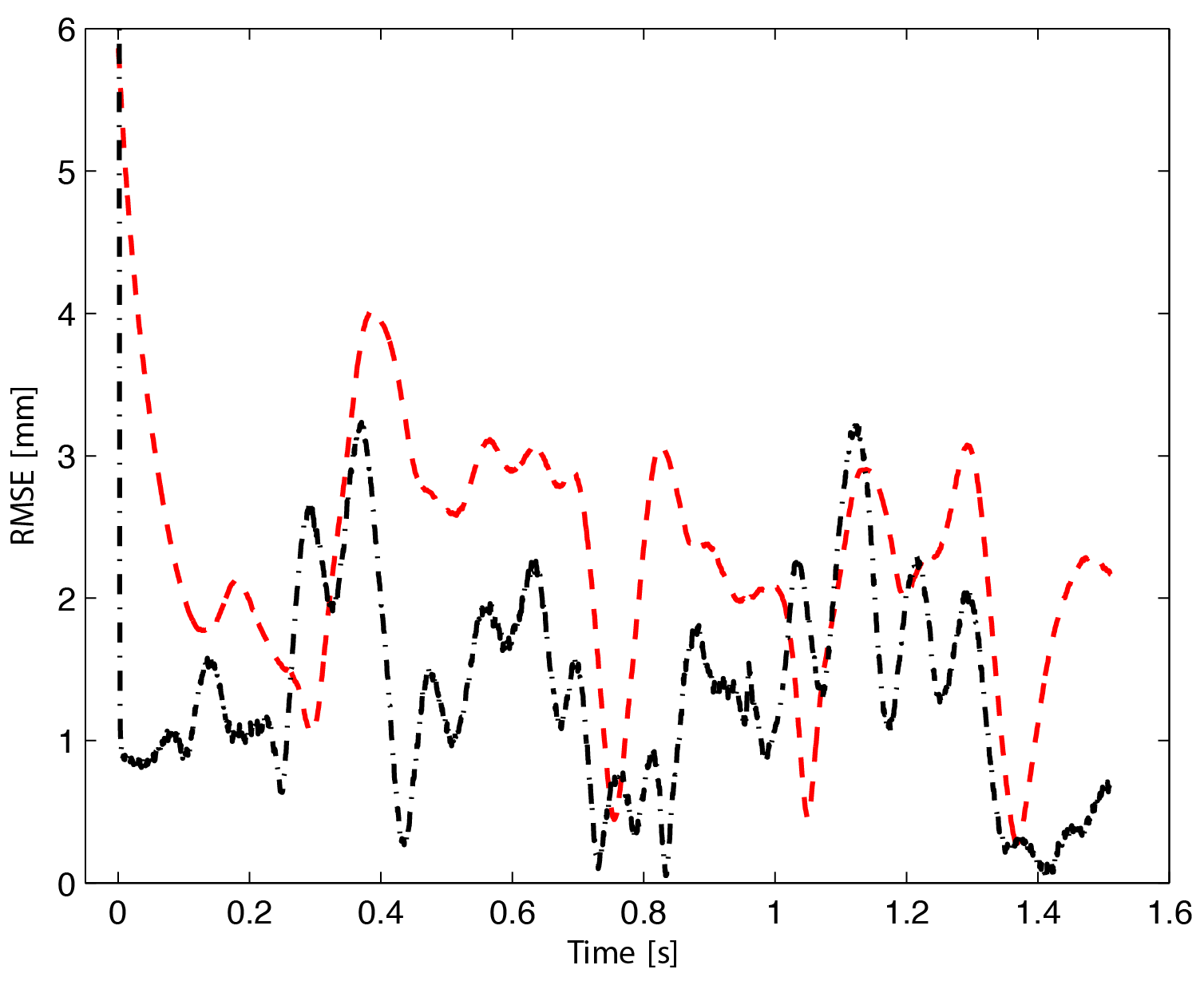
The estimation error (RMSE) of a trajectory from an ABB IRB4600 robot. An extended Kalman filter (EKF) in red and a particle filter (PF) in black have been used to estimate the trajectory. Both filter use measurements of the motor position as well as measurements of the acceleration of the robot tool.
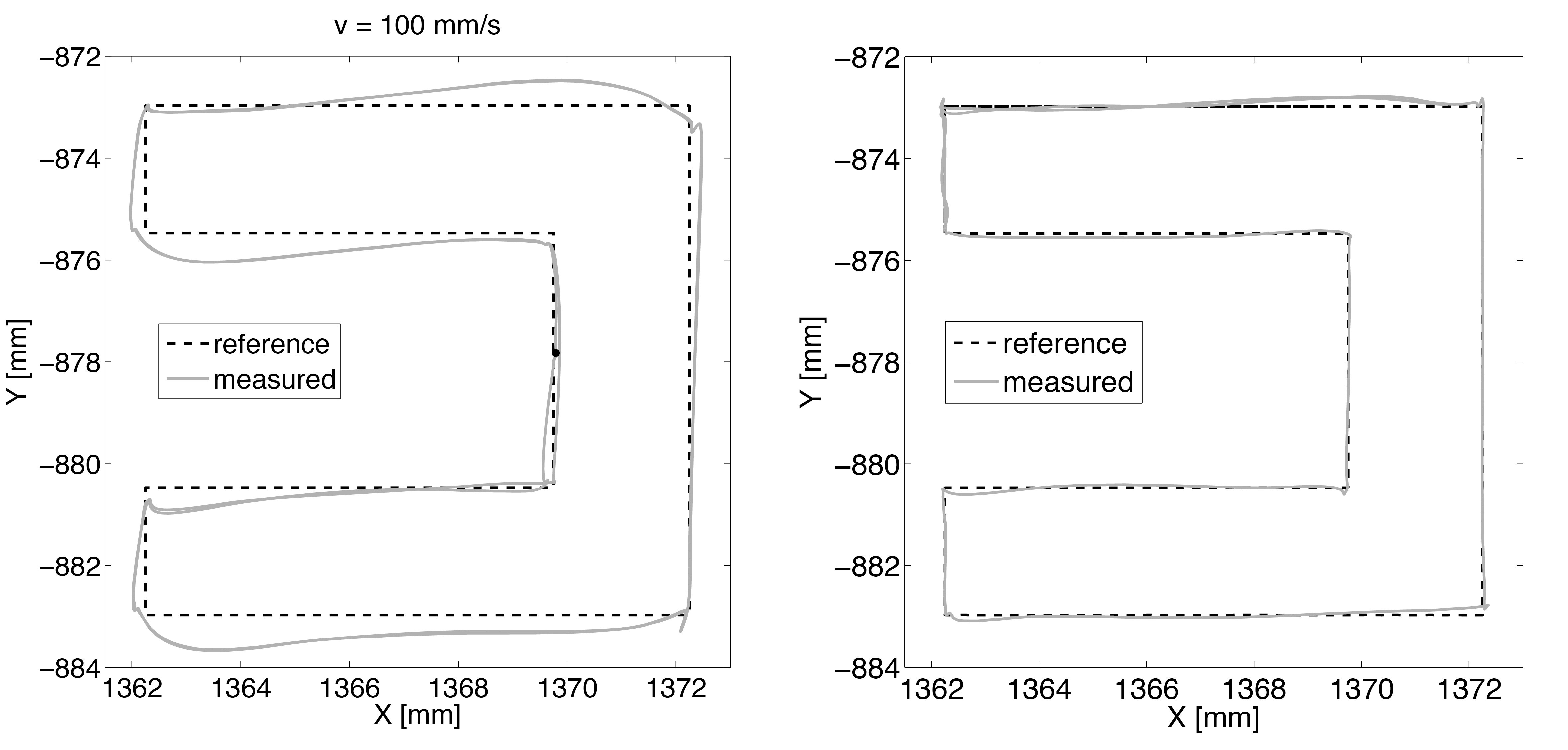
The left figure shows the nominal performance, in terms of tool path, for a Gantry-Tau parallel kinematic robot structure when the robot is controlled using the conventional control system. The right figure shows the performance after ten iterations when Iterative Learning Control (ILC) is applied to the Gantry-Tau robot as a complement to the conventional control system.
Informationsansvarig: Svante Gunnarsson
Senast uppdaterad: 2022-06-23
